My Hitachi MB-H2 MSX machine has an analog RGB port that produces a 15.6 KHz CSYNC (combined horizontal and vertical) signal and analog voltages indicating how red, green or yellow things are.
I recently unearthed my old LCD from 2006 or so and decided to see if I could get it to sync if I just massaged the CSYNC signal a bit to bring it to TTL levels and connected a VGA cable.
(Technical details: when you connect a VGA cable to a monitor that is powered on, you will often first of all see a message like “Cable not connected”. To get past that problem, you first have to ground a certain pin on the VGA connector. I found that female Dupont connectors fit reasonably well on male VGA connectors so I just used a cable with female Dupont connectors on both ends to connect the two relevant pins. I’m not sure if it’s the same pin on all monitors. You can find the pin by looking for a pin that should be GND according to the VGA pinout but actually has some voltage on it. Don’t blame me if you break your Dupont connectors by following this advice.)
Unfortunately, that didn’t work. I got “Input not supported”, and I am reasonably sure that is because my monitor doesn’t support 15 KHz signals. Aw, why’d I even bother taking it out of storage?
So what do we do… Well there is this library (PicoVGA) that produces VGA signals using the Raspberry Pi Pico’s PIOs. Raspberry Pi Picos are extremely cheap, just about 600 yen per piece where I am.
Damn, I’ve seen this in videos, but seeing this in real life, a tiny, puny microcontroller generating fricking VGA signals! Amazing. Just last year I was playing around with monochrome composite output on an Arduino Nano, and even that was super impressive to me! (Cue people reading this 20 years in the future and laughing at the silly dude with the retro microcontroller from year-of-the-pandemic 2020. I’m sure microcontrollers in the 2040s will have 32 cores and dozens of pins with built-in 1 GHz DACs and ADCs and mains voltage tolerance, and will be able to generate a couple streams of 4K video ;D)
Some boring technical notes I took before embarking on the project, feel free to skip this section
Is the Pico’s VGA library magic? Yes, definitely. Can we add our own magic to simultaneously capture video and output it via the VGA library?
It sure looks like it! Why?
- The Pico has two CPU cores, and the VGA library uses just one of them, the second core
- Dual-core microcontroller, that’s craziness
- We may be able to use the second core a little bit anyway (“If the second core is not very busy (e.g. when displaying 8-bit graphics that are simply transferred using DMA transfer), it can also be used for the main program work.”)
- We will indeed be working with 8-bit graphics simply transferred using DMA
- The Pico has two PIO controllers, and the VGA library uses just one (“The display of the image by the PicoVGA library is performed by the PIO processor controller. PIO0 is used. The other controller, PIO1, is unused and can be used for other purposes.”)
However:
- We possibly won’t be able to use DMA all that much (“Care must also be taken when using DMA transfer. DMA is used to transfer data to the PIO. Although the transfer uses a FIFO cache, using a different DMA channel may cause the render DMA channel to be delayed and thus cause the video to drop out. A DMA overload can occur, for example, when a large block of data in RAM is transferred quickly. However, the biggest load is the DMA transfer of data from flash memory. In this case, the DMA channel waits for data to be read from flash via QSPI and thus blocks the DMA render channel.”)
- If we use PIO and DMA for capturing video-in, we might run into trouble there
- However, using DMA to capture and another DMA transfer to transfer the data to VGA out sounds somewhat inefficient; maybe it’s possible to directly transfer from capture PIO to VGA PIO? Would require modifications to the VGA library, which doesn’t sound so great right now (we didn’t do this)
That said, it’s likely that capturing without the use of PIO would be fast enough, generally speaking.
The “pixel clock” for a 320×200 @ 60 Hz signal is between 4.944 and 6 MHz according to https://tomverbeure.github.io/video_timings_calculator (select 320×200 / 60 in the drop-down menu), depending on some kind of mode that I don’t know anything about.
According to our oscilloscope capture of a single pixel on one of the color channels (DS1Z_QuickPrint22.png), we get about 5.102 MHz. Let’s take that value. We’ll hopefully be able to calculate the exact value at some point. (Yeah, the TMS59918A/TMS59928A/TMS59929A datasheet actually (almost) mentions the exact value! “The VDP is designed to operate with a 10.738635 (± 0.005) MHz crystal”, “This master clock is divided by two to generate the pixel clock (5.3 MHz)”. So it’s 5.3693175 MHz, thank you very much.)
This means that we have to be able to capture at exactly that frequency. From our previous experimental logic analyzer (which doesn’t use PIO) we were more than capable of capturing everything going on with our Z80 CPU — we had multiple samples of every single state the CPU happened to be in, and the CPU ran at 3.58 MHz. (However, if the VGA library chooses to set the CPU to use a lower clock frequency, we may run into problems. It’s possible to prevent the library from adjusting the clock frequency, but maybe that will impact image quality.) The main part of the code looked like this:
for (i = 0; i < LOGIC_BUFFER_LEN; i++) {
logic_buffer[i] = gpio_get_all() & ALL_REGULAR_GPIO_PINS;
}
To capture video, we’d like to post-process our capture just a little bit, to convert it to 3-3-2 RGB. Or we could post-process our capture during VSYNC, but that would be a rather tight fit, with only 1.2 ms to work with. (Actually, our signal’s VSYNC pulse is even shorter than that, but there’s nothing on the RGB pins for a while before and after that.)
So our loop might look like this. (Note, the code I ended up writing looks reasonably similar to this, which is why I’m including this here.)
for (x = 0; x < 320; x++) {
pixel = gpio_get_all();
red = msb_table_inverted[((pixel & R_MASK) >> R_SHIFT) << R_SHIFT];
green = msb_table_inverted[((pixel & G_MASK) >> G_SHIFT) << G_SHIFT];
blue = msb_table_inverted[((pixel & B_MASK) >> B_SHIFT) << B_SHIFT];
capture[y][x] = red | (green << 3) | (blue << 6);
}
Where msb_table_inverted is a lookup table to convert our raw GPIO input to the proper R/G/B values. This depends on how we do the analog to digital conversion, so the loop might look slightly different in the end.
Well, how likely is it that this will produce a perfectly synced capture? About 0% in my opinion. If we’re too fast, we’ll get a horizontally compressed image. If we’re too slow, the image will be wider than it should be, and more importantly, cut off on the right side.
In the first case, we may be able to improve the situation by adding the right amount of NOPs.
In the second case, we could reduce the amount of on-the-fly post-processing, and do stuff during HBLANK or VBLANK instead.
In addition, we might miss a few pixels on the left side if we can’t begin capturing immediately when we get our HSYNC interrupt. How likely is this to succeed? It might work, I think.
The PIOs can also be used without DMA. (Instead of using DMA, we’d use functions like pio_sm_get_blocking().) With PIO, we can get perfect timing, which would be really great to have. We can’t off-load any arithmetic or bit twiddling operations, the PIOs don’t have that. So let’s dig in and run some experiments.
Implementation
The pico_examples repository has a couple of PIO examples. The PicoVGA library has a hello world example. I thought the logic_analyser example in pico_examples looked like a good start. It’s really quite amazing.
- You can specify the number of samples you’d like to read (const uint CAPTURE_N_SAMPLES = 96)
- You can specify the number of pins you’d like to sample from (const uint CAPTURE_PIN_COUNT = 2)
- You can specify the frequency you’d like to read at (logic_analyser_init(pio, sm, CAPTURE_PIN_BASE, CAPTURE_PIN_COUNT, 1.f), where “1.f” is a divider of the system clock. I.e., this will capture at system clock speed. We can specify a float number here.)
- The PIO input is (mostly?) independent from what else you have going on on that pin, so the code of course proceeds to configure a PWM signal on a pin, and to capture from that same pin. Bonkers!
Well, let’s cut to the chase, shall we? I took parts of the logic_analyser code to capture the input from RGB, then wrote some code to massage the captured data a little bit, and then output everything using PicoVGA at a higher resolution. After some troubleshooting, I got a readable signal!
However, my capture has wobbly scanlines. Which is why there might be a part 2. And since it’s wobbly, I spent even less effort on the analog to digital conversion than I’d originally planned, which was already rather “poor man” (more on that later, because the code assumes that circuit exists).
I’m triggering the capture by looking for a positive to negative transition. (That’s already two out of the three instructions my PIO program consists of, one to wait for positive, one to wait for negative.) I currently don’t really know why my scanlines are wobbly. I had a few looks with the oscilloscope to see if there’s anything wrong in my circuit that converts CSYNC to TTL levels — for example, slow response from the transistor. But I didn’t find anything so far. :3 It’s of course entirely possible that the source signal is wonky. I’ve never had a chance to connect my MSX to a monitor that supports 15 KHz signals. (Now that’s a major TODO right there.) Of course there are other ways to check if the signal is okay.
We could also (hopefully) get rid of the wobbling by only paying attention to the VSYNC and timing scanlines ourselves, for example by generating them using the Pico’s PWM. As seen in the original logic_analyser.c code! But that’s something for part 2 I guess.
BTW, it’s unlikely that the wobbliness is being caused by a problem with the code or resource contention. I tested this by switching the capture to an off-screen buffer after a few seconds. The screen displayed the last frame captured into the real framebuffer, and was entirely static. I.e., I added code like this into the main loop (which you will see below):
+ if (j > 600) {
+ rgb_buf = fake_rgb_buf;
+ gpio_put(PICO_DEFAULT_LED_PIN, true);
+ } else {
+ j++;
+ }Poor-man’s ADC
What I actually planned to do: the program I wrote expects four different levels of red, green, and blue. There are three pins per color, and if all pins of a color are 0, that means that color is 0, if only one is 1, that’s still quite dark, if two are 1, that’s somewhat bright, and if all three are 1, then that’s bright. The program then converts that into two bits (0, 1, 2, 3); PicoVGA works with 8-bit colors, 3 bits for red, 3 bits for green, 2 bits for blue. That means that we can capture all the blue we need, and for red and green we could scale the numbers a bit. However, I shelved that plan for now, because I don’t even have enough potentiometers at the moment, and if the signal is as wobbly as it is, that’s just putting lipstick on a pig. Instead, I just took a single color (blue, just because that was less likely to short my MacGyver wiring), and feed that into all colors’ “bright” pin.
As my MSX’s RGB signal voltages are a bit funky (-0.7 to 0.1 IIRC), I converted that to something the Pico can understand using a simple class A-kinda amplifier. The signal gets inverted by this circuit, but that’s fine for a POC. Completely blue will be black, and vice versa.
So here’s the code:
#include "include.h"
#include <stdio.h>
#include <stdlib.h>
#include "pico/stdlib.h"
#include "hardware/pio.h"
#include "hardware/dma.h"
#include "hardware/structs/bus_ctrl.h"
// Some logic to analyse:
#include "hardware/structs/pwm.h"
const uint CAPTURE_PIN_BASE = 9;
const uint CAPTURE_PIN_COUNT = 10; // CSYNC, 3*R, 3*G, 3*B
const float PIXEL_CLOCK = 5369.3175f; // datasheet (TMS9918A_TMS9928A_TMS9929A_Video_Display_Processors_Data_Manual_Nov82.pdf) page 3-8 / section 3.6.1 says 5.3693175 MHz (10.73865/2)
// from same page on datasheet
// HORIZONTAL PATTERN OR MULTICOLOR TEXT
// HORIZONTAL ACTIVE DISPLAY 256 240
// RIGHT BORDER 15 25
// RIGHT BLANKING 8 8
// HORIZONTAL SYNC 26 26
// LEFT BLANKING 2 2
// COLOR BURST 14 14
// LEFT BLANKING 8 8
// LEFT BORDER 13 19
// TOTAL 342 342
const uint INPUT_VIDEO_WIDTH = 308; // left blanking + color burst + left blanking + left border + active + right border
// VERTICAL LINE
// VERTICAL ACTIVE DISPLAY 192
// BOTTOM BORDER 24
// BOTTOM BLANKING 3
// VERTICAL SYNC 3
// TOP BLANKING 13
// TOP BORDER 27
// TOTAL 262
const uint INPUT_VIDEO_HEIGHT = 240; // top blanking + top border + active + 1/3 of bottom border
const uint INPUT_VIDEO_HEIGHT_OFFSET_Y = 40; // ignore top 40 (top blanking + top border) scanlines
// we're capturing everything there is to see on the horizontal axis, but throwing out most of the border on the vertical axis
// NOTE: other machines probably have different blanking/border periods
const uint CAPTURE_N_SAMPLES = INPUT_VIDEO_WIDTH;
const uint OUTPUT_VIDEO_WIDTH = 320;
const uint OUTPUT_VIDEO_HEIGHT = 200;
static_assert(OUTPUT_VIDEO_WIDTH >= INPUT_VIDEO_WIDTH);
static_assert(OUTPUT_VIDEO_HEIGHT >= INPUT_VIDEO_HEIGHT-INPUT_VIDEO_HEIGHT_OFFSET_Y);
uint offset; // Lazy global variable; this holds the offset of our PIO program
// Framebuffer
ALIGNED u8 rgb_buf[OUTPUT_VIDEO_WIDTH*OUTPUT_VIDEO_HEIGHT];
static inline uint bits_packed_per_word(uint pin_count) {
// If the number of pins to be sampled divides the shift register size, we
// can use the full SR and FIFO width, and push when the input shift count
// exactly reaches 32. If not, we have to push earlier, so we use the FIFO
// a little less efficiently.
const uint SHIFT_REG_WIDTH = 32;
return SHIFT_REG_WIDTH - (SHIFT_REG_WIDTH % pin_count);
}
void logic_analyser_init(PIO pio, uint sm, uint pin_base, uint pin_count, float div) {
// Load a program to capture n pins. This is just a single `in pins, n`
// instruction with a wrap.
uint16_t capture_prog_instr[3];
capture_prog_instr[0] = pio_encode_wait_gpio(false, pin_base);
capture_prog_instr[1] = pio_encode_wait_gpio(true, pin_base);
capture_prog_instr[2] = pio_encode_in(pio_pins, pin_count);
struct pio_program capture_prog = {
.instructions = capture_prog_instr,
.length = 3,
.origin = -1
};
offset = pio_add_program(pio, &capture_prog);
// Configure state machine to loop over this `in` instruction forever,
// with autopush enabled.
pio_sm_config c = pio_get_default_sm_config();
sm_config_set_in_pins(&c, pin_base);
sm_config_set_wrap(&c, offset+2, offset+2); // do not repeat pio_encode_wait_gpio instructions
sm_config_set_clkdiv(&c, div);
// Note that we may push at a < 32 bit threshold if pin_count does not
// divide 32. We are using shift-to-right, so the sample data ends up
// left-justified in the FIFO in this case, with some zeroes at the LSBs.
sm_config_set_in_shift(&c, true, true, bits_packed_per_word(pin_count)); // push when we have reached 32 - (32 % pin_count) bits (27 if pin_count==9, 30 if pin_count==10)
sm_config_set_fifo_join(&c, PIO_FIFO_JOIN_RX); // TX not used, so we can use everything for RX
pio_sm_init(pio, sm, offset, &c);
}
void logic_analyser_arm(PIO pio, uint sm, uint dma_chan, uint32_t *capture_buf, size_t capture_size_words,
uint trigger_pin, bool trigger_level) {
pio_sm_set_enabled(pio, sm, false);
// Need to clear _input shift counter_, as well as FIFO, because there may be
// partial ISR contents left over from a previous run. sm_restart does this.
pio_sm_clear_fifos(pio, sm);
pio_sm_restart(pio, sm);
dma_channel_config c = dma_channel_get_default_config(dma_chan);
channel_config_set_read_increment(&c, false);
channel_config_set_write_increment(&c, true);
channel_config_set_dreq(&c, pio_get_dreq(pio, sm, false)); // pio_get_dreq returns something the DMA controller can use to know when to transfer something
dma_channel_configure(dma_chan, &c,
capture_buf, // Destination pointer
&pio->rxf[sm], // Source pointer
capture_size_words, // Number of transfers
true // Start immediately
);
pio_sm_exec(pio, sm, pio_encode_jmp(offset)); // just restarting doesn't jump back to the initial_pc AFAICT
pio_sm_set_enabled(pio, sm, true);
}
void blink(uint32_t ms=500)
{
gpio_put(PICO_DEFAULT_LED_PIN, true);
sleep_ms(ms);
gpio_put(PICO_DEFAULT_LED_PIN, false);
sleep_ms(ms);
}
// uint8_t msb_table_inverted[8] = { 3, 3, 3, 3, 2, 2, 1, 0 };
uint8_t msb_table_inverted[8] = { 0, 1, 2, 2, 3, 3, 3, 3 };
void post_process(uint8_t *rgb_bufy, uint32_t *capture_buf, uint buf_size_words)
{
uint16_t i, j, k;
uint32_t temp;
for (i = 8, j = 0; i < buf_size_words; i++, j += 3) { // start copying at pixel 24 (8*3) (i.e., ignore left blank and color burst, exactly 24 pixels).
temp = capture_buf[i] >> (2+1); // 2: we're only shifting in 30 bits out of 32, 1: ignore csync
rgb_bufy[j] = msb_table_inverted[temp & 0b111]; // red
rgb_bufy[j] |= (msb_table_inverted[(temp & 0b111000) >> 3] << 3); // green
rgb_bufy[j] |= (msb_table_inverted[(temp & 0b111000000) >> 6] << 6); // blue
temp >>= 10; // go to next sample, ignoring csync
rgb_bufy[j+1] = msb_table_inverted[temp & 0b111]; // red
rgb_bufy[j+1] |= (msb_table_inverted[(temp & 0b111000) >> 3] << 3); // green
rgb_bufy[j+1] |= (msb_table_inverted[(temp & 0b111000000) >> 6] << 6); // blue
temp >>= 10; // go to next sample, ignoring csync
rgb_bufy[j+2] = msb_table_inverted[temp & 0b111]; // red
rgb_bufy[j+2] |= (msb_table_inverted[(temp & 0b111000) >> 3] << 3); // green
rgb_bufy[j+2] |= (msb_table_inverted[(temp & 0b111000000) >> 6] << 6); // blue
}
}
int main()
{
uint16_t i, y;
gpio_init(PICO_DEFAULT_LED_PIN);
gpio_init(CAPTURE_PIN_BASE);
gpio_set_dir(PICO_DEFAULT_LED_PIN, GPIO_OUT);
gpio_set_dir(CAPTURE_PIN_BASE, GPIO_IN);
blink();
// initialize videomode
Video(DEV_VGA, RES_CGA, FORM_8BIT, rgb_buf);
blink();
// We're going to capture into a u32 buffer, for best DMA efficiency. Need
// to be careful of rounding in case the number of pins being sampled
// isn't a power of 2.
uint total_sample_bits = CAPTURE_N_SAMPLES * CAPTURE_PIN_COUNT;
total_sample_bits += bits_packed_per_word(CAPTURE_PIN_COUNT) - 1;
uint buf_size_words = total_sample_bits / bits_packed_per_word(CAPTURE_PIN_COUNT);
uint32_t *capture_buf0 = (uint32_t*)malloc(buf_size_words * sizeof(uint32_t));
hard_assert(capture_buf0);
uint32_t *capture_buf1 = (uint32_t*)malloc(buf_size_words * sizeof(uint32_t));
hard_assert(capture_buf1);
blink();
// Grant high bus priority to the DMA, so it can shove the processors out
// of the way. This should only be needed if you are pushing things up to
// >16bits/clk here, i.e. if you need to saturate the bus completely.
// (Didn't try this)
// bus_ctrl_hw->priority = BUSCTRL_BUS_PRIORITY_DMA_W_BITS | BUSCTRL_BUS_PRIORITY_DMA_R_BITS;
PIO pio = pio1;
uint sm = 0;
uint dma_chan = 8; // 0-7 may be used by VGA library (depending on resolution)
logic_analyser_init(pio, sm, CAPTURE_PIN_BASE, CAPTURE_PIN_COUNT, (float)Vmode.freq/PIXEL_CLOCK);
blink();
// 1) DMA in 1st scan line, wait for completion
// 2) DMA in 2nd scan line, post-process previous scan line, wait for completion
// 3) DMA in 3rd scan line, post-process previous scan line, wait for completion
// ...
// n) Post-process last scanline
// I'm reasonably sure we have enough processing power to post-process scanlines in real time, we should have about 80 us.
// At 126 MHz each clock cycle is about 8 ns, so we have 10000 instructions to process about 320 bytes, or 31.25 instructions per byte.
while (true) {
// "Software-render" vsync detection... I.e., wait for low on csync, usleep for hsync_pulse_time+something, check if we're still low
// If we are, that's a vsync pulse!
// This works well enough AFAICT
while (true) {
while(gpio_get(CAPTURE_PIN_BASE)); // wait for negative pulse on csync
sleep_us(10); // hsync negative pulse is about 4.92 us according to oscilloscope, so let's wait a little longer than 4.92 us
if (!gpio_get(CAPTURE_PIN_BASE)) // we're still low! this must be a vsync pulse
break;
}
for (y = 0; y <= INPUT_VIDEO_HEIGHT_OFFSET_Y; y ++) { // capture and throw away first 40 scanlines, capture without throwing away 41st scanline
logic_analyser_arm(pio, sm, dma_chan, capture_buf0, buf_size_words, CAPTURE_PIN_BASE, true);
dma_channel_wait_for_finish_blocking(dma_chan);
}
for (y = 1; y < (INPUT_VIDEO_HEIGHT-INPUT_VIDEO_HEIGHT_OFFSET_Y)-1; y += 2) {
logic_analyser_arm(pio, sm, dma_chan, capture_buf1, buf_size_words, CAPTURE_PIN_BASE, true);
post_process(rgb_buf + (y-1)*OUTPUT_VIDEO_WIDTH, capture_buf0, buf_size_words);
dma_channel_wait_for_finish_blocking(dma_chan);
logic_analyser_arm(pio, sm, dma_chan, capture_buf0, buf_size_words, CAPTURE_PIN_BASE, true);
post_process(rgb_buf + y*OUTPUT_VIDEO_WIDTH, capture_buf1, buf_size_words);
dma_channel_wait_for_finish_blocking(dma_chan);
}
post_process(rgb_buf + (y-2)*OUTPUT_VIDEO_WIDTH, capture_buf0, buf_size_words);
}
}Replace vga_hello/src/main.cpp with the above file and recompile (make program.uf2). Maybe this post will help if you are on something that isn’t Windows and can’t get this to compile.
Explanation
The PIO program is generated in the logic_analyser_init function. Here it is again:
capture_prog_instr[0] = pio_encode_wait_gpio(false, pin_base);
capture_prog_instr[1] = pio_encode_wait_gpio(true, pin_base);
capture_prog_instr[2] = pio_encode_in(pio_pins, pin_count);
struct pio_program capture_prog = {
.instructions = capture_prog_instr,
.length = 3,
.origin = -1
};First we wait for a “false” (low) signal. Then a “true” (high) signal. Then we read. Okay… but that doesn’t make any sense, does it?
No, it doesn’t, but maybe with the following bit of code:
sm_config_set_wrap(&c, offset+2, offset+2); // do not repeat pio_encode_wait_gpio instructionssm_config_set_wrap is used to tell the PIOs how to loop the PIO program. And in this case, we loop after we have executed the instruction at offset+2, and we jump to offset+2. The instruction at offset+2 is the “in” instruction. That is, we just keep executing the “in” instruction, except the first time. The first time, we wait for low on CSYNC, then wait for high on CSYNC, and then (as this state means that the CSYNC pulse is over) we keep reading as fast as we can (at the programmed PIO speed).
Results
Let’s take a look at the results. Remember, we’re converting to monochrome, and only looking at the blue channel. Remember that our super lazy “analog frontend” is super lazy, and the potentiometer has to be fine-tuned to get to a sweet spot that allows everything on the screen to be displayed.

Actually the HBLANK front porches are gone now after I fixed a typo in the code. But it’s still quite wobbly. Maybe not quite as wobbly as in the above video?
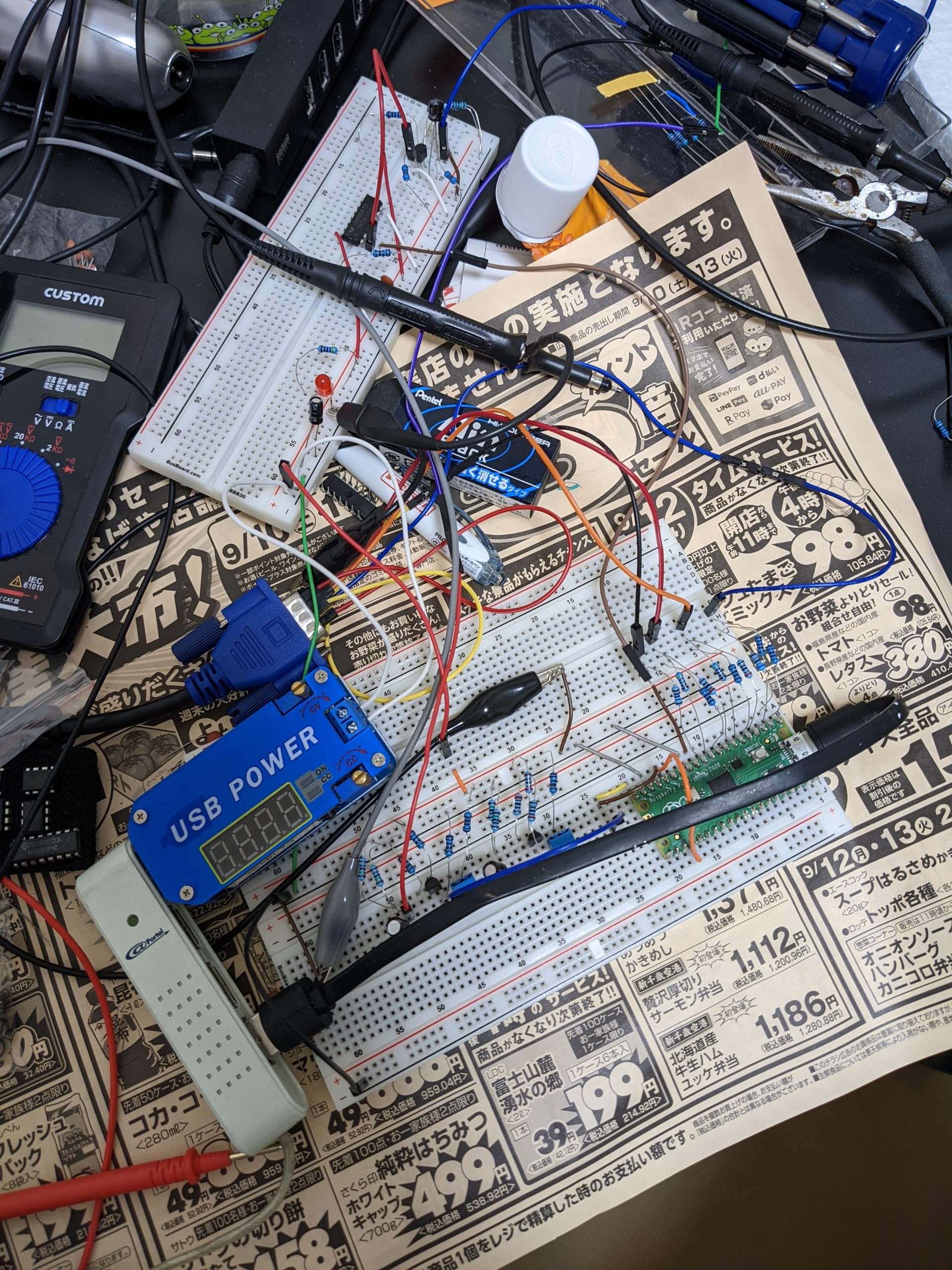
What’s the pen and the eraser doing here? TBH my eyes just tend to filter out junk after a while. So stuff just sort of becomes part of the scenery.
Minor update
Fixing a typo in the code (already fixed above as it made no sense to leave it there) fixed up the signal quite a bit. I also added buttons to fine-tune the pixel clock. This stabilizes the signal significantly. However, hopefully mostly due to the fact that our analog frontend is a bit lame, we get a somewhat fuzzy image, where some pixels change between black and white. I am somewhat tempted to build out the analog frontend properly but before that I think I’ll try my hand at digital RGB, more on that in a later post.
Anyway, here’s the updated code for analog input, with support for two buttons to fine-tune the pixel clock:
#include "include.h"
#include <stdio.h>
#include <stdlib.h>
#include "pico/stdlib.h"
#include "hardware/pio.h"
#include "hardware/dma.h"
#include "hardware/structs/bus_ctrl.h"
const uint CAPTURE_PIN_BASE = 9;
const uint CAPTURE_PIN_COUNT = 10; // CSYNC, 3*R, 3*G, 3*B
const uint INCREASE_BUTTON_PIN = 20;
const uint DECREASE_BUTTON_PIN = 21;
const PIO pio = pio1;
const uint sm = 0;
const uint dma_chan = 8; // 0-7 may be used by VGA library (depending on resolution)
const float PIXEL_CLOCK = 5369.3175f; // datasheet (TMS9918A_TMS9928A_TMS9929A_Video_Display_Processors_Data_Manual_Nov82.pdf) page 3-8 / section 3.6.1 says 5.3693175 MHz (10.73865/2)
// the pixel clock has a tolerance of +-0.005 (i.e. +- 5 KHz), let's add a facility to adjust our hard-coded pixel clock:
const float PIXEL_CLOCK_ADJUSTER = 0.1; // KHz
// from same page on datasheet
// HORIZONTAL PATTERN OR MULTICOLOR TEXT
// HORIZONTAL ACTIVE DISPLAY 256 240
// RIGHT BORDER 15 25
// RIGHT BLANKING 8 8
// HORIZONTAL SYNC 26 26
// LEFT BLANKING 2 2
// COLOR BURST 14 14
// LEFT BLANKING 8 8
// LEFT BORDER 13 19
// TOTAL 342 342
const uint INPUT_VIDEO_WIDTH = 308; // left blanking + color burst + left blanking + left border + active + right border
// VERTICAL LINE
// VERTICAL ACTIVE DISPLAY 192
// BOTTOM BORDER 24
// BOTTOM BLANKING 3
// VERTICAL SYNC 3
// TOP BLANKING 13
// TOP BORDER 27
// TOTAL 262
const uint INPUT_VIDEO_HEIGHT = 240; // top blanking + top border + active + 1/3 of bottom border
const uint INPUT_VIDEO_HEIGHT_OFFSET_Y = 40; // ignore top 40 (top blanking + top border) scanlines
// we're capturing everything there is to see on the horizontal axis, but throwing out most of the border on the vertical axis
// NOTE: other machines probably have different blanking/border periods
const uint CAPTURE_N_SAMPLES = INPUT_VIDEO_WIDTH;
const uint OUTPUT_VIDEO_WIDTH = 320;
const uint OUTPUT_VIDEO_HEIGHT = 200;
static_assert(OUTPUT_VIDEO_WIDTH >= INPUT_VIDEO_WIDTH);
static_assert(OUTPUT_VIDEO_HEIGHT >= INPUT_VIDEO_HEIGHT-INPUT_VIDEO_HEIGHT_OFFSET_Y);
uint offset; // Lazy global variable; this holds the offset of our PIO program
// Draw box
ALIGNED u8 rgb_buf[OUTPUT_VIDEO_WIDTH*OUTPUT_VIDEO_HEIGHT];
static inline uint bits_packed_per_word(uint pin_count) {
// If the number of pins to be sampled divides the shift register size, we
// can use the full SR and FIFO width, and push when the input shift count
// exactly reaches 32. If not, we have to push earlier, so we use the FIFO
// a little less efficiently.
const uint SHIFT_REG_WIDTH = 32;
return SHIFT_REG_WIDTH - (SHIFT_REG_WIDTH % pin_count);
}
void logic_analyser_init(PIO pio, uint sm, uint pin_base, uint pin_count, float div) {
// Load a program to capture n pins. This is just a single `in pins, n`
// instruction with a wrap.
static bool already_initialized_once = false;
uint16_t capture_prog_instr[3];
capture_prog_instr[0] = pio_encode_wait_gpio(false, pin_base);
capture_prog_instr[1] = pio_encode_wait_gpio(true, pin_base);
capture_prog_instr[2] = pio_encode_in(pio_pins, pin_count);
struct pio_program capture_prog = {
.instructions = capture_prog_instr,
.length = 3,
.origin = -1
};
if (already_initialized_once) {
pio_remove_program(pio, &capture_prog, offset);
}
offset = pio_add_program(pio, &capture_prog);
already_initialized_once = true;
// Configure state machine to loop over this `in` instruction forever,
// with autopush enabled.
pio_sm_config c = pio_get_default_sm_config();
sm_config_set_in_pins(&c, pin_base);
sm_config_set_wrap(&c, offset+2, offset+2); // do not repeat pio_encode_wait_gpio instructions
sm_config_set_clkdiv(&c, div);
// Note that we may push at a < 32 bit threshold if pin_count does not
// divide 32. We are using shift-to-right, so the sample data ends up
// left-justified in the FIFO in this case, with some zeroes at the LSBs.
sm_config_set_in_shift(&c, true, true, bits_packed_per_word(pin_count)); // push when we have reached 32 - (32 % pin_count) bits (27 if pin_count==9, 30 if pin_count==10)
sm_config_set_fifo_join(&c, PIO_FIFO_JOIN_RX); // TX not used, so we can use everything for RX
pio_sm_init(pio, sm, offset, &c);
}
void logic_analyser_arm(PIO pio, uint sm, uint dma_chan, uint32_t *capture_buf, size_t capture_size_words,
uint trigger_pin, bool trigger_level) {
// TODO: disable interrupts
pio_sm_set_enabled(pio, sm, false);
// Need to clear _input shift counter_, as well as FIFO, because there may be
// partial ISR contents left over from a previous run. sm_restart does this.
pio_sm_clear_fifos(pio, sm);
pio_sm_restart(pio, sm);
dma_channel_config c = dma_channel_get_default_config(dma_chan);
channel_config_set_read_increment(&c, false);
channel_config_set_write_increment(&c, true);
channel_config_set_dreq(&c, pio_get_dreq(pio, sm, false)); // pio_get_dreq returns something the DMA controller can use to know when to transfer something
dma_channel_configure(dma_chan, &c,
capture_buf, // Destination pointer
&pio->rxf[sm], // Source pointer
capture_size_words, // Number of transfers
true // Start immediately
);
pio_sm_exec(pio, sm, pio_encode_jmp(offset)); // just restarting doesn't jump back to the initial_pc AFAICT
pio_sm_set_enabled(pio, sm, true);
}
void blink(uint32_t ms=500)
{
gpio_put(PICO_DEFAULT_LED_PIN, true);
sleep_ms(ms);
gpio_put(PICO_DEFAULT_LED_PIN, false);
sleep_ms(ms);
}
// uint8_t msb_table_inverted[8] = { 3, 3, 3, 3, 2, 2, 1, 0 };
uint8_t msb_table_inverted[8] = { 0, 1, 2, 2, 3, 3, 3, 3 };
void post_process(uint8_t *rgb_bufy, uint32_t *capture_buf, uint buf_size_words)
{
uint16_t i, j, k;
uint32_t temp;
for (i = 8, j = 0; i < buf_size_words; i++, j += 3) { // start copying at pixel 24 (8*3) (i.e., ignore left blank and color burst, exactly 24 pixels).
temp = capture_buf[i] >> (2+1); // 2: we're only shifting in 30 bits out of 32, 1: ignore csync
rgb_bufy[j] = msb_table_inverted[temp & 0b111]; // red
rgb_bufy[j] |= (msb_table_inverted[(temp & 0b111000) >> 3] << 3); // green
rgb_bufy[j] |= (msb_table_inverted[(temp & 0b111000000) >> 6] << 6); // blue
temp >>= 10; // go to next sample, ignoring csync
rgb_bufy[j+1] = msb_table_inverted[temp & 0b111]; // red
rgb_bufy[j+1] |= (msb_table_inverted[(temp & 0b111000) >> 3] << 3); // green
rgb_bufy[j+1] |= (msb_table_inverted[(temp & 0b111000000) >> 6] << 6); // blue
temp >>= 10; // go to next sample, ignoring csync
rgb_bufy[j+2] = msb_table_inverted[temp & 0b111]; // red
rgb_bufy[j+2] |= (msb_table_inverted[(temp & 0b111000) >> 3] << 3); // green
rgb_bufy[j+2] |= (msb_table_inverted[(temp & 0b111000000) >> 6] << 6); // blue
}
}
void adjust_pixel_clock(float adjustment) {
static absolute_time_t last_adjustment = { 0 };
static float pixel_clock_adjustment = 0.0f;
absolute_time_t toc = get_absolute_time();
if (absolute_time_diff_us(last_adjustment, toc) > 250000) {
pio_sm_set_enabled(pio, sm, false);
pixel_clock_adjustment += adjustment;
last_adjustment = toc;
logic_analyser_init(pio, sm, CAPTURE_PIN_BASE, CAPTURE_PIN_COUNT, ((float)Vmode.freq)/(PIXEL_CLOCK+pixel_clock_adjustment));
}
}
int main()
{
uint16_t i, y;
gpio_init(PICO_DEFAULT_LED_PIN);
gpio_init(CAPTURE_PIN_BASE);
gpio_set_dir(PICO_DEFAULT_LED_PIN, GPIO_OUT);
gpio_set_dir(CAPTURE_PIN_BASE, GPIO_IN);
blink();
// initialize videomode
Video(DEV_VGA, RES_CGA, FORM_8BIT, rgb_buf);
blink();
// We're going to capture into a u32 buffer, for best DMA efficiency. Need
// to be careful of rounding in case the number of pins being sampled
// isn't a power of 2.
uint total_sample_bits = CAPTURE_N_SAMPLES * CAPTURE_PIN_COUNT;
total_sample_bits += bits_packed_per_word(CAPTURE_PIN_COUNT) - 1;
uint buf_size_words = total_sample_bits / bits_packed_per_word(CAPTURE_PIN_COUNT);
uint32_t *capture_buf0 = (uint32_t*)malloc(buf_size_words * sizeof(uint32_t));
hard_assert(capture_buf0);
uint32_t *capture_buf1 = (uint32_t*)malloc(buf_size_words * sizeof(uint32_t));
hard_assert(capture_buf1);
blink();
// Grant high bus priority to the DMA, so it can shove the processors out
// of the way. This should only be needed if you are pushing things up to
// >16bits/clk here, i.e. if you need to saturate the bus completely.
// (Didn't try this)
// bus_ctrl_hw->priority = BUSCTRL_BUS_PRIORITY_DMA_W_BITS | BUSCTRL_BUS_PRIORITY_DMA_R_BITS;
logic_analyser_init(pio, sm, CAPTURE_PIN_BASE, CAPTURE_PIN_COUNT, (float)Vmode.freq/PIXEL_CLOCK);
blink();
// 1) DMA in 1st scan line, wait for completion
// 2) DMA in 2nd scan line, post-process previous scan line, wait for completion
// 3) DMA in 3rd scan line, post-process previous scan line, wait for completion
// ...
// n) Post-process last scanline
// I'm reasonably sure we have enough processing power to post-process scanlines in real time, we should have about 80 us.
// At 126 MHz each clock cycle is about 8 ns, so we have 10000 instructions to process about 320 bytes, or 31.25 instructions per byte.
while (true) {
// "Software-render" vsync detection... I.e., wait for low on csync, usleep for hsync_pulse_time+something, check if we're still low
// If we are, that's a vsync pulse!
// This works well enough AFAICT
while (true) {
while(gpio_get(CAPTURE_PIN_BASE)); // wait for negative pulse on csync
sleep_us(10); // hsync negative pulse is about 4.92 us according to oscilloscope, so let's wait a little longer than 4.92 us
if (!gpio_get(CAPTURE_PIN_BASE)) // we're still low! this must be a vsync pulse
break;
}
for (y = 0; y <= INPUT_VIDEO_HEIGHT_OFFSET_Y; y ++) { // capture and throw away first 40 scanlines, capture without throwing away 41st scanline
logic_analyser_arm(pio, sm, dma_chan, capture_buf0, buf_size_words, CAPTURE_PIN_BASE, true);
dma_channel_wait_for_finish_blocking(dma_chan);
}
for (y = 1; y < (INPUT_VIDEO_HEIGHT-INPUT_VIDEO_HEIGHT_OFFSET_Y)-1; y += 2) {
logic_analyser_arm(pio, sm, dma_chan, capture_buf1, buf_size_words, CAPTURE_PIN_BASE, true);
post_process(rgb_buf + (y-1)*OUTPUT_VIDEO_WIDTH, capture_buf0, buf_size_words);
dma_channel_wait_for_finish_blocking(dma_chan);
logic_analyser_arm(pio, sm, dma_chan, capture_buf0, buf_size_words, CAPTURE_PIN_BASE, true);
post_process(rgb_buf + y*OUTPUT_VIDEO_WIDTH, capture_buf1, buf_size_words);
dma_channel_wait_for_finish_blocking(dma_chan);
}
post_process(rgb_buf + (y-2)*OUTPUT_VIDEO_WIDTH, capture_buf0, buf_size_words);
if (gpio_get(INCREASE_BUTTON_PIN)) {
adjust_pixel_clock(PIXEL_CLOCK_ADJUSTER); // + some Hz
} else if (gpio_get(DECREASE_BUTTON_PIN)) {
adjust_pixel_clock(-PIXEL_CLOCK_ADJUSTER); // - some Hz
}
}
}
Amazing work! Was recently talking to someone if a Pico could be used as a cheap scandoubler and well you proved it 🙂
Thanks for the comment, sorry for taking a long time to approve it. (Holiday madness, but the good kind.)
Wow, that’s an impressive journey. I stumbled upon your post in search of away to convert a rather non-standard monochrome analog output of an old Olivetti M19 8088 pc to something that a modern monitor can display. One of the problems is that the vertical frequency is less than 50 Hz, I think around 45 Hz. For this the CRT monitor is very slow and the phosphor has a bit of an afterglow. No problem for working in text mode. To solve the 45 Hz issue I thought a conversion to digital might allow me to create a 60 Hz after capture and processing. The v-sync and h-sync info is available on separate pins, I think in TTL format. The monochrome screen text resolution is 640 X 480.
So here’s my question: I have a feeling your work should lend itself to be adjusted to suit my needs.
Am I right? I am pretty new at this, so I need to build on work done by others.
Hi, yes, you could use my work. But a couple of years have passed and nicer things may be available. Maybe search for something like ‘pico rgb 2 vga’, I see a couple of promising results: https://github.com/holmatic/video_if_ql_vga https://github.com/AlexEkb4ever/ZX_RGBI2VGA-HDMI These are for “digital RGB” to VGA. Monochrome is very similar to digital RGB, you could either modify the code to only look at a single signal, or if you don’t feel comfortable modifying the PIO code, you could just connect the same signal to all four pins.
Are you thinking of converting to VGA or to HDMI? Anyway, here’s some more info that is not covered in the blog post, sometimes assuming VGA:
1) If you have different vertical frequencies you may want to think about how to display them when using a different output vertical frequency. You could either 1) not care (and get some tearing, likely not easily noticeable in text mode), 2) add code to duplicate frames, or 3) generate an output with an out-of-spec vertical frequency and check if your VGA monitor happens to support it.
2) The key to getting a non-wobbly picture is to set the Pico to operate at a frequency that is a multiple of your pixel clock. However, you need to take two pixel clocks into account, your input and your output, which may make this difficult. If it doesn’t look to be possible, maybe don’t worry too much, the picture won’t be too wobbly.
Hi! That’s fast! Thanks! I’m fine trying to change the code on the Pico assuming it’s Python or C++.
I agree with your notes on the vertical frequency. I thought that once I have it digitally, I can just add as many frames as I need. For static text that should not be an issue.
I had seen the Pico rgb to vga, but indeed that’s digital. Yours is analog which is more like my situation I thought.
Any modern output is fine, HDMI or VGA. Once there, it’s easy enough to go from one to the other with an adapter if needed. VGA is more suitable for an older looking 4:3 flat panel that matches the Olivetti better.
I have to check what the pixelclock is. There are people on the Vintage Computer Forum that may know. I will check. https://vcfed.org/
I will checkout the Pico rgb to vga once more with your comments in mind.
I was mistaken, I had discovered a different Pico solution: https://m.youtube.com/watch?v=kgDOiGoxKvE
It’s very illuminating for someone who is new at this. In the 2nd video he explains the pixelproblem you mentioned.
The Pico can manage 640×240 in color, but you have shown that 640×480 in monochrome should fit also. In the video he also shows Hercules in mono, that’s close I would think.
There are a couple of challenges: my input is analog, I need to change both the horizontal and the vertical frequency.
Hi, your input is analog, but you will find that there is no major difference between analog and digital when the signal is monochrome.
The Pico of course expects a signal that is either 0V or 3.3V, and your display signal probably doesn’t fulfill these expectations. Instead, it might be 0V and 0.7V, or 0V and 5V, or something else. But since it’s monochrome it’s still quasi-digital. You can figure out the voltage level if you have access to an oscilloscope. (You should also check the HSYNC and VSYNC signals, are they really TTL, i.e. 0V and 5V?) Changing these signals to a voltage level that the Pico likes is very easy. In the luckiest case, a single resistor may be enough (if the output expects a terminating resistor). In the general case, you use one or two transistors to perform a level shift. There are many different circuits that could probably do the level shift, but the easiest one (common emitter) may not work that well for display signals (a multi-MHz signal) and what’s more inverts the signal, so you need two “stages” because you need to also undo the inversion. (In this blog post I also had to use a handful of transistors to shift levels.) (Note that I interpreted the color signal as a monochrome signal, I was thinking of building a more advanced analog stage out of transistors (which seems doable with only 16 colors) but in the end I kind of lost interest :p)
Note: many display signal standards will additionally have a 70 ohm termination inside the monitor. You may be able to check this using a multimeter, just measure the resistance between the signal pins and GND, on the monitor side. When this termination is present you will probably measure different voltage levels with an oscilloscope.
Hi, these are all very valid points!
1) It is actually a 16 colors gray scale signal. So I am looking into a simple but fast ADC that can make it digital.
2) Level shifting and voltage change may indeed be required. I was told the output voltage ranges between -3 to +7V. But I’m not sure if this was measured with the monitor connected! So I may have to measure myself.
3) I found an IC that is designed for video level shifting. I posted it here in this discussion: https://forum.vcfed.org/index.php?threads/paradise-pvc2-questions-on-olivetti-m19.1245902/post-1429444
4) The designer of the MCE blaster I linked has offered to write specific firmware if I get to building all this.
Yes, buying an ADC (shouldn’t be expensive) would be the best option, especially if you have 16 shades of grey.
(If you find that you actually only have (e.g.) three or four different levels, you could probably still implement it using discrete transistors without too much effort. This is what I’d originally planned on doing for this project, as I have 16 colors spread across R, G, and B, it seemed like it shouldn’t be too much effort.)
Good luck! Should be doable I think!
Thanks! I ordered some D9 connectors to insert a breadboard between the PC and the monitor and start taking some measurements. Then see if I can create a 0-0.7V signal and then add a ADC. I plan to post my progress on the vcfed forum. If I get stuck and need your help, I will reach out to you.